Research
Gibbot
Brachiating robot that used a double pendulum design to propel itself across a vertical steel sheet.
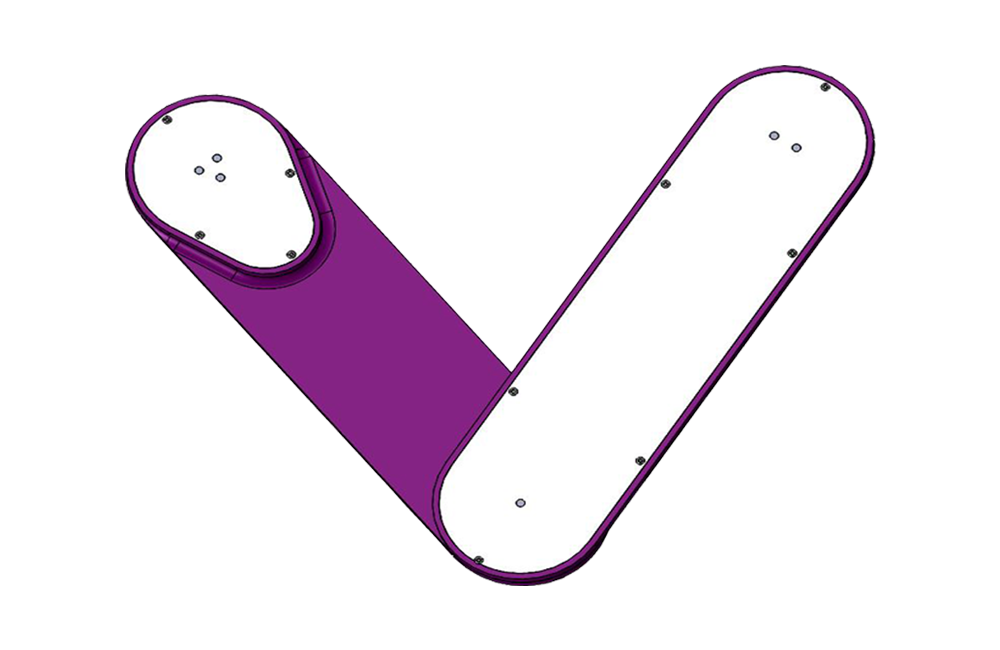
The gibbot was designed to mimic the way monkeys swing from tree to tree. It was held to a vertical steel sheet with two magnets, one at each end. When both magnets are activated, it is in its resting position. To move, one magnet turns off and the motor engages to swing the robot around and catch itself in a new resting position.